CONCURRENT
MANAGEMENT OF BILATERAL URETEROPELVIC JUNCTION OBSTRUCTION IN CHILDREN
USING ROBOTIC-ASSISTED LAPAROSCOPIC SURGERY
(
Download pdf )
DREW A. FREILICH, HIEP T. NGUYEN, JOSEPH BORER, CALEB NELSON, CARLO C. PASSEROTTI
Department of Urology, Children’s Hospital Boston, Harvard Medical School, Boston, Massachusetts, USA
ABSTRACT
Introduction:
Bilateral ureteropelvic junction (UPJ) obstruction occurs infrequently.
When surgical management is deemed necessary, staged pyeloplasties traditionally
have been recommended to minimize the morbidity associated with performing
procedures concurrently. With the advent of robotic-assistance, concurrent
surgical management can more readily be performed laparoscopically. In
this report, we evaluated the safety and outcome of managing patients
with bilateral UPJ obstruction with concurrent robotic-assisted laparoscopic
pyeloplasty.
Materials and Methods: We performed a retrospective
review of five patients with bilateral ureteropelvic junction obstruction
who underwent concurrent bilateral robotic-assisted pyeloplasties at our
institution between October 2003 and April 2007. Technical consideration
for patient positioning, robotic set-up, port placement, and the use of
a hitch stitches was assessed. The operative time, complications, analgesic
needs, length of hospitalization, and overall success of the procedure
were evaluated.
Results: Operative time ranged from 235
to 541 minutes (mean = 384). Estimated blood loss was 5-100 cc (mean =
48.0). Length of hospitalization ranged from 1.3 to 3.6 days (mean = 2.4).
Ureteral stents were removed 3-8 weeks postoperatively. There were no
complications. All kidneys demonstrated decreased hydronephrosis on postoperative
ultrasound or improved drainage parameters on diuretic renography or IVP.
Conclusions: Simultaneous bilateral robotic-assisted
laparoscopic pyeloplasties utilizing 4-port access is feasible and safe.
It provides an effective method of managing patients with bilateral UPJ
obstruction, avoiding the burden and morbidity of performing staged surgeries.
Key
words: pediatrics; hydronephrosis; laparoscopy; robotics; pyeloplasty
Int Braz J Urol. 2008; 34: 198-205
INTRODUCTION
In
children, bilateral ureteropelvic junction obstruction is present in approximately
10-40% of UPJ obstructions (1,2). Most bilateral cases are asymmetrical,
with one side being more severely affected than the other. When surgical
intervention is deemed necessary, staged pyeloplasties traditionally have
been recommended. While the success of performing concurrent bilateral
open pyeloplasties has been reported (3), many surgeons remain hesitant
to perform this procedure because of the morbidity associated with operating
on both kidneys concurrently and the potential for acute bilateral renal
obstruction. As a result, staged pyeloplasty is often considered safer.
However, it requires the need for the patient to undergo two separate
operations, which are separated by a potentially prolonged recovery period.
Laparoscopic surgery has achieved increasing
popularity in the management of ureteropelvic junction (UPJ) obstruction
in children. Its less invasive nature provides for more rapid recovery
and improved cosmesis. Successful concurrent bilateral pyeloplasties utilizing
free-hand laparoscopy have been reported (4). However, it remains technically
challenging. Robotic-assisted surgery has significantly decreased surgeon
learning curves as compared to free-hand laparoscopy, while at the same
time achieving postoperative outcomes comparable to open pyeloplasty (5).
Thus, it may be of benefit in the concurrent surgical management of bilateral
UPJ obstruction. In this study, we evaluated the safety and outcome of
performing concurrent robotic-assisted laparoscopic pyeloplasties.
MATERIALS AND METHODS
After Institutional Review Board approval was obtained a retrospective review was initiated. Between October 2003 and April 2007, five patients underwent concurrent robotic-assisted bilateral pyeloplasties for the management of bilateral ureteropelvic junction obstruction at our institution. All patients had preoperative radiologic imaging including ultrasonography, diuretic renography, or intravenous pyelogram indicative of the diagnosis of bilateral ureteropelvic junction obstruction. The indications for surgery included increasing degree of hydronephrosis, pain, urinary tract infection, and parental preference.
Surgical
Technique
Preoperatively, patients received a clear
liquid diet for 24 hours and a rectal suppository the night before the
procedure. After the induction of anesthesia, the patient was placed in
supine position and a 30-degree wedge was placed under the patient elevating
the more affected side. The patient was then carefully secured to the
operating table, prepped and draped.
To insert the trocars, the table was rotated
to place the patient in a flat supine position in order for the ports
to be placed safely into the peritoneum. A 12 mm camera port was inserted
in the umbilicus. Three 5 or 8 mm working ports were then inserted; the
first in the midline 10 cm above the umbilicus and the other two in the
mid-clavicular line in the right and left lower quadrant (Figure-1). After
placing the ports, the patient was maximally rotated to the contralateral
side, which helped to shift the bowel away from the renal fossa. The robotic
system was then engaged.
The procedure was performed as previously
described by Lee et al. (5). In brief, the peritoneum was incised along
the avascular white line of Toldt. After reflection of the colon and incising
through anterior lamina of Gerota’s fascia, blunt dissection was
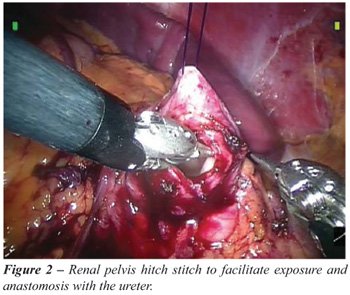
performed to expose the renal pelvis, UPJ and proximal ureter. A hitch
stitch was utilized to elevate the renal pelvis for easier dissection
and suturing (Figure-2). An incision through the renal pelvis was then
made above the UPJ. After excising the UPJ segment, the ureter was transposed
over any existing crossing vessel and anastomosed back to the pelvis after
it was spatulated. A running suture of 5-0 vicryl or monocryl was used
in all cases. A kidney internal splint/stent (KISS) or a double-J stent
was placed, depending on the surgeon’s preference.
After completion of the anastomosis, surgery
was performed on the contralateral kidney. All the ports were wrapped
in sterile towels to maintain sterility during the changeover. Either
of two methods was used to set up the robotic system for the contralateral
pyeloplasty. The first involved moving the robot to the opposite side,
which necessitated powering down the robot and re-arranging the room set
up. The second involved rotating the patient 180-degrees, with careful
monitoring of the endotracheal tube and the patient during the change
of position. Over time, we preferred the later method, which was more
practical. Careful discussion and planning with the anesthesiologists
(such as placement of extension tubing and longer monitoring cables) prior
to start of the procedure allowed the patients to be moved safely and
efficiently during the changeover. The exact same set-up and surgical
procedure was performed as previously described. At the end of the procedure,
all ports sites were closed.
The stents were removed per the surgeon’s
preference. Follow-up imaging with renal ultrasonography were performed
on all patients. If improvement in the degree of hydronephrosis was observed
postoperatively and the patients were asymptomatic, only an ultrasonography
was performed during subsequent follow-up visits. If there were any concerns
regarding the degree of hydronephrosis observed postoperatively, a diuretic
renography (MAG-3) or intravenous pyelogram was carried out to assess
drainage.
RESULTS
The
age of the patients was 3.4-14.0 years (mean - 9.5 years). All patients
had a voiding cystouretrogram (VCUG) preoperatively to rule out concomitant
reflux. No patient had preoperative drainage (i.e. nephrostomy). The operative
time ranged from 235 to 541 minutes (mean = 384). Estimated blood loss
ranged from 5 to 100 cc (0.2-2 cc/kg) with a mean of 48.0 cc (1.3 cc/kg).
Total perioperative morphine equivalent requirement (i.e. codeine and
fentanyl) ranged from 0.77 to 3.71 mg/kg (mean = 1.7). There were no intraoperative
or postoperative complications. The length of hospitalization ranged from
1.3 to 3.6 days (mean = 2.4). All patients had ureteral stents placed
bilaterally (3 with double-J stents, 2 with KISS). In 4 patients, the
stents were removed sequentially 3 to 6 weeks postoperatively, with a
1-2 weeks interval in between each stent removal. In one patient, both
stents were removed simultaneously at 8 weeks. All patients received prophylactic
antibiotics until both stents were removed. Postoperative follow-up ranged
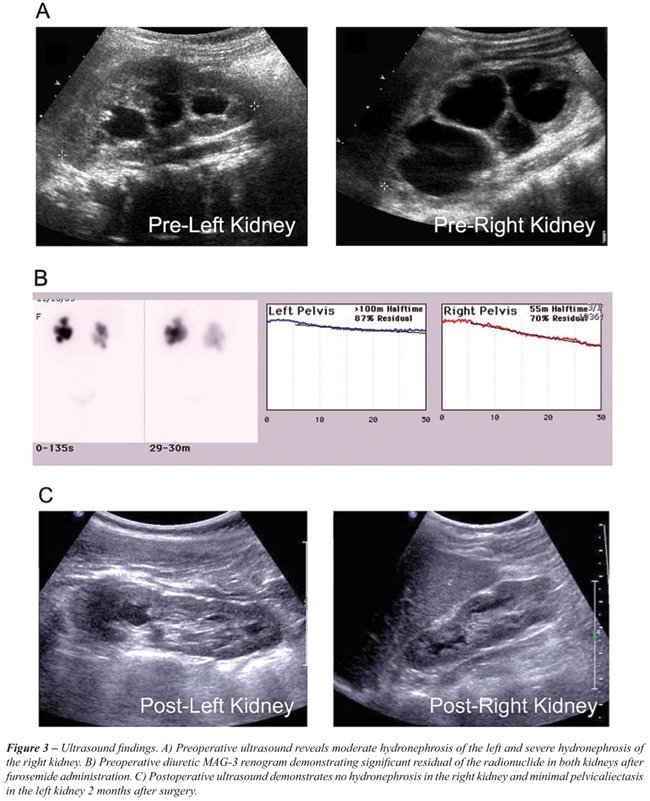
from 2 to 43.7 months (mean = 11.4). Table-1 details the patients’
intraoperative findings, conditions and radiologic evaluation at the time
of last follow-up. Figure-3 illustrates typical pre- and postoperative
radiologic findings in our patients with bilateral UPJ obstruction managed
with concurrent laparoscopic pyeloplasties.
COMMENTS
The
efficacy and safety of robotic-assisted unilateral pyeloplasty is well
documented. To our knowledge this is the first reported series regarding
concurrent robotic-assisted laparoscopic bilateral pyeloplasties. We found
that performing these procedures concurrently can be time saving. The
operative time was reasonable, considering our mean time for performing
a unilateral robotic laparoscopic pyeloplasty was 219 minutes (5). The
most experienced robotic surgeon at our institution performed his first
bilateral robotic-assisted case in 235 minutes, compared to 268 minutes
in a published series utilizing free-hand laparoscopy. With increased
experience we believe the time savings of simultaneous bilateral robotic-assisted
pyeloplasty versus free-hand laparoscopy will continue to increase (5).
We observed that by re-positioning the patient rather than the robotic
system we could decrease the changeover time to 10-20 minutes. In addition,
we decreased the operative times by inserting all 4 trocars at the beginning
of the surgery, avoiding the need to place new ports when operating on
the contralateral kidney. This also helped to decrease the operative times
by avoiding the need to change around the robotic instruments to pass
and cut sutures, provide suction/ irrigation, and remove materials.
We also found that this procedure may have
significant benefits compared to staged open procedure. The use of perioperative
morphine equivalent in this case series (mean of 1.7 mg/kg) is only marginally
higher than a recently published cohort from our institution who underwent
unilateral open pyeloplasty (mean 1.5 mg/kg). Since the patients in this
series only underwent one procedure rather two, this suggests that concurrent
bilateral pyeloplasties subjected patients to less pain than staged unilateral
surgical interventions. The mean length of hospitalization (2.4 days)
for patients undergoing bilateral laparoscopic pyeloplasties is identical
to those undergoing unilateral laparoscopic pyeloplasty and is less than
that for open surgery (3.5 days) (5). Of note, the length of hospitalization
consistently decreased over time, presumably secondary to increased surgeon
experience with robotic-assisted surgery in unilateral pyeloplasty procedures
and the postoperative monitoring of such patients. Additionally, the patient
benefits from improved cosmesis associated with minimally invasive surgery.
Most importantly, the entire procedure with all the necessary re-positioning
maneuvers was done without any intraoperative complications. However,
future larger scale studies with long term patient follow up will be required
to completely evaluate the safety of concurrent robotic-assisted laparoscopic
bilateral pyeloplasty as compared to a staged approach.
Moreover, our short-term follow up data
suggests that concurrent robotic-assisted bilateral laparoscopic pyeloplasties
may have postoperative outcomes comparable to that of unilateral open
and conventional laparoscopic procedures. In follow-up, all patients in
this series were asymptomatic. Their postoperative radiological evaluation
demonstrated significant improvement in the degree of hydronephrosis on
US or in the drainage parameters seen on diuretic renography or IVP. The
level of imaging improvement in conjunction with clinical improvement
was used to determine success. Stenting patterns were similar to the unilateral
laparoscopic pyeloplasty cases. Placement of the stents and their staged
removal avoided the potential complication of simultaneous bilateral renal
obstruction. It could be argued that unlike the staged open procedure,
where stenting is not routinely performed, concurrent surgery requires
two additional procedures for the removal of the double-J stents. We feel
however, that the additional procedures (stent removal) while requiring
anesthesia when performed on children, have minimal risks and morbidity.
Alternatively, KISS stents that can be removed in the clinic without anesthesia
can be utilized, as was the preference of one of the surgeons in this
study. At our institution, an ultrasound is performed 1-3 months after
stent removal to asses the level of hydronephrosis. If significant improvement
is observed, a follow-up ultrasound is performed at 6-12 months postoperatively.
If the initial postoperative ultrasound does not show improvement, a follow
up ultrasound is performed three months after the initial postoperative
ultrasound. If this repeat ultrasound does not demonstrate significant
improvement, a furosimide-MAG3 renogram is performed. Prospective studies
regarding the impact on the quality of life of this type of surgical management
will be required to more definitely assess the utility of simultaneous
bilateral pyeloplasties.
CONCLUSION
Robotic-assisted surgery offers an advantage in the management of bilateral renal pathologies such as bilateral UPJ obstruction. The results of this small cohort in conjunction with our institution’s increasing experience with robotic-assisted surgery demonstrates that robotic-assisted simultaneous bilateral pyeloplasties are feasible, and may have postoperative outcomes comparable to unilateral open and conventional laparoscopic pyeloplasty. The use of the four ports, patient positioning and the hitch stitch will help to make the procedure effective and allow it to be performed in a time saving manner.
ACKNOWLEDGEMENTS
Dr. Carlo C. Passerotti received grants from CAPES and FAPESP, Brazilian Funding Agencies.
CONFLICT OF INTEREST
None declared.
REFERENCES
- Nixon HH: Hydronephrosis in children; a clinical study of seventy-eight cases with special reference to the role of aberrant renal vessels and the results of conservative operations. Br J Surg. 1953; 40: 601-9.
- Lebowitz RL, Griscom NT: Neonatal hydronephrosis: 146 cases. Radiol Clin North Am. 1977; 15: 49-59.
- Eckstein HB, Drake DP: Simultaneous bilateral pyeloplasties. Proc R Soc Med. 1976; 69: 665.
- Schwab CW 2nd, Casale P: Bilateral dismembered laparoscopic pediatric pyeloplasty via a transperitoneal 4-port approach. J Urol. 2005; 174: 1091-3.
- Lee RS, Retik AB, Borer JG, Peters CA: Pediatric robot assisted laparoscopic dismembered pyeloplasty: comparison with a cohort of open surgery. J Urol. 2006; 175: 683-7; discussion 687.
____________________
Accepted after revision:
January 18, 2008
_______________________
Correspondence address:
Dr. Hiep T. Nguyen
Department of Urology
Children’s Hospital Boston
300 Longwood Avenue, Hunnewell-353
Boston, MA 02115, USA
Fax: + 1 617 730-0474
E-mail: hiep.nguyen@childrens.harvard.edu
EDITORIAL COMMENT
In
the last decade, interest has been evolving in the search for implementation
of minimally invasive surgical techniques in pediatric population harboring
urological pathologies. As a result of this process, the adoption, evolution
and diversification of the laparoscopic approach in children has been
inevitable, contributing to better esthetic results, increased magnification
and improved intraoperative visualization, reduced postoperative pain,
and shorter hospital stays.
Initially used as a diagnostic modality
in the treatment of cryptorchidism, pediatric laparoscopic surgery is
currently performed for complex ablative (e.g. nephrectomy, adrenalectomy,
etc.) as well as reconstructive procedures such as ureteropelvic junction
obstruction (UPJO). Laparoscopic pyeloplasty can be done either trans
or retroperitonealy. Advocates of the retroperitoneal approach suggested
an easier dissection, but there is less working space in the retroperitoneum,
often making the procedure difficult in smaller children and infants,
and there is some question as to whether crossing vessels are more easily
missed. In addition, a bilateral retroperitoneal approach implies intraoperative
repositioning of the patient and lack of possible use of common ports
for both sides.
The introduction of robotic surgery could
offer real advantages including a greater ability for intracorporeal suturing,
enhanced stereoscopic visualization with true depth-of-field vision, and
shortening of the learning curve for laparoscopy.
The study presented in this issue deals
with the feasibility and safety of performing bilateral robotic-assisted
laparoscopic repair of UPJO. The authors should be applauded for their
contribution in popularization and diversification of robotic-assisted
surgery in pediatric urology. The description of the technical approach
is clear and detailed, and the use of common ports for both sides, introduced
at the beginning of the procedure, is reasonable and appears to contribute
to better esthetic results and decreased repositioning time. There is
no doubt that feasibility and safety has been proven, however, the small
number of patients and the short term follow-up do not allow concluding
the late outcome of the procedure. Lessons learned from adult series have
suggested that although failures become evident within the first 12 months,
they can occur as late as 3 years after intervention (1). As such, pediatric
patients should be followed up at least that long to ensure a lasting
result. With laparoscopic pyeloplasty reported success rate of more than
90%, comparable with the results of the gold standard open pyeloplasty,
it is not surprising that endopyelotomy lost the game and is in course
of being abandoned as a first line treatment, unless performed in very
selective situations. Failures of laparoscopic pyeloplasty may sometimes
occur, however infrequently and the experience gained with adults has
revealed that recurrent UPJO can be endoscopically resolved, with a high
success rate. The minimal invasiveness of the endoscopic approach in such
cases also appears to be appealing in the pediatric population, obviating
the need for another open or laparoscopic repair. It was performed successfully
at any age and it should be kept in mind as a possible alternative in
children (2).
Overall, the early results with robotically
assisted laparoscopic pyeloplasty are encouraging and warrant further
evaluation in pediatric urological surgery. It appears that the robot
is most helpful to those early in their training, and its major value
will be in increasing access to minimally invasive procedures in centers
lacking experience in complex laparoscopic techniques. However, its cost
effectiveness remained to be determined in relation to the type of procedure
and the individual institutional surgical volume.
REFERENCES
- Dimarco DS, Gettman MT, McGee SM, Chow GK, Leroy AJ, Slezak J, et al.: Long-term success of antegrade endopyelotomy compared with pyeloplasty at a single institution. J Endourol. 2006; 20: 707-12.
- Sofer M, Binyamini J, Ekstein PM, Bar-Yosef Y, Chen J, Matzkin H, et al.: Holmium laser ureteroscopic treatment of various pathologic features in pediatrics. Urology. 2007; 69: 566-9.
Dr.
Mario Sofer
Director of Endourological Service
Tel-Aviv Sourasky Medical Center, Tel-Aviv University
Tel-Aviv, Israel
E-mail: mariosofer@hotmail.com